
MakeCode
[ ]
]
Programmieren mit MakeCode
Die Codeblöcke für das MotionKit lassen sich als Erweiterung laden. Als eine kleine Starthilfe in MakeCode, gibt es hier eine Schritt-für-Schritt Anleitung.
Über das ”+” lässt sich ein neues Projekt starten.

Wähle deine Hardware aus.
Erweiterungen öffnen

Erweiterung auswählen
Gib die folgende Adresse im neuen Fenster Paket hinzufügen ein: https://github.com/tinysuperlab/motionkitBei mobiler Nutzung ist dieses Paket zu laden (damit bleibt Bluetooth weiterhin verfügbar): https://github.com/tinysuperlab/motionkit_bluetooth
Klicke auf die MotionKit. Das Motionkit wird nun in der Block-Bibliothek installiert.

MotionKit Paket
Das Motion Kit Paket erscheint in der Codeblock-Bibliothek und stellt die Codeblöcke bereit.
Du möchtest mit der Programmiersprache NEPO® programmieren? Schalte in den Experten Modus (*2) und verwende die MotionKit Blöcke aus der Kategorie Bewegung.
Servomotoren kalibrieren
Achtung! Servo-Motoren drehen sich nicht immer ganz genau. Um bessere Ergebnisse zu erzielen, lohnt es sich die Motoren zu kalibrieren. Hier ist ein ganz einfaches Projekt, in dem die nötigen Blöcke genutzt werden:

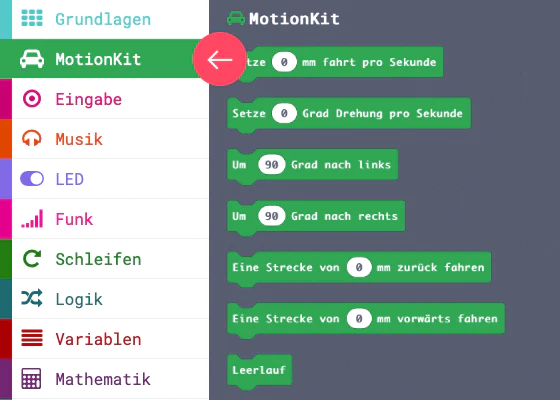
Servomotoren steuern
Steuere die beiden Servomotoren getrennt voneinander oder gemeinsam. Du bestimmst die Richtung und das Tempo.
Über folgende Codeblöcke lassen sich die beiden Servomotoren steuern:
Du möchtest mit der Programmiersprache NEPO® programmieren? Hier findest du den Programmcode .
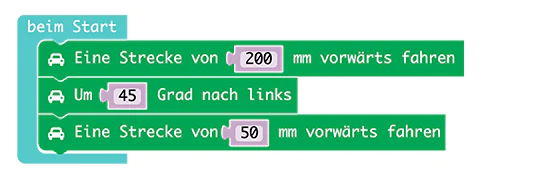
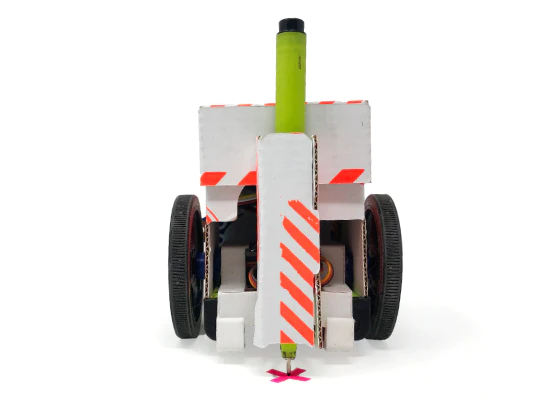
Mal-Roboter
Löse vorsichtig die Form für den Stifthalter des Mal-Roboters aus der Vorlage und falte sie zusammen. Der Teil mit der Halterung ist unten und wird in die Rahmen gesteckt. Der Deckel muss beim Zusammenbauen abgenommen werden und am Schluss langsam zwischen die Lücke des Stifthalters geschoben werden. Sobald der Deckel den Stifthalter von eben hält, kannst du einen eine Proberunde drehen. Dann einen Stift einsetzen und loslegen – ein großes Papier unterlegen nicht vergessen!
Du möchtest mit der Programmiersprache NEPO® programmieren? Hier findest du den Programmcode
Ferngesteuert
Steuere dein Calliope mini Auto durch einen Parcours oder veranstalte ein kleines Autorennen. Verbinde dazu zwei Calliope mini und leg los!

Du möchtest mit der Programmiersprache NEPO® programmieren? Hier findest du den Programmcode für den Sender und den Empfänger .
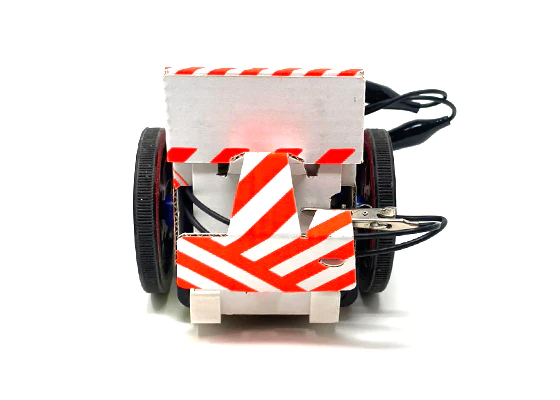
Autoscooter
Lass es krachen und bastel dir dein eigenes Autoscooter. Du hast keine Vorstellung, wie das gehen soll? Macht nichts, hier wird dir genau gezeigt, wie du das mit dem MotionKit hinbekommst!
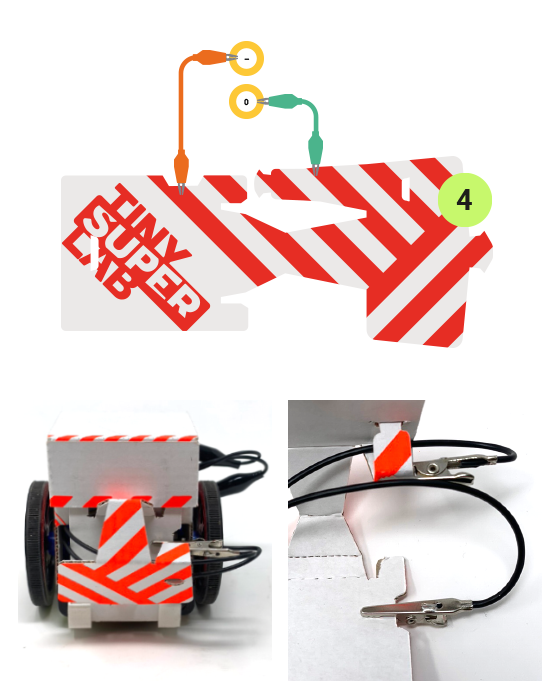
Löse vorsichtig die Form für den Autoscooter aus der Vorlage und nimm die beiden Krokoklemmen aus der Packung. Die Seiten der Krokoklemmen, die an der Form hängen, müssen sich später am Metall berühren. Damit das besser geht, solltest du die Ummantellung zu der jeweils anderen Seite schieben. Das geht am einfachsten, wenn die Klemmen geöffnet sind (dazu kannst du die Klemmen z.B. an einen Stift befestigen). Nun klemmst du die eine Krokoklemme in die kleine Ausbuchtung und die andere vorsichtig an den kleinen Arm. Jetzt kannst du die Vorlage zusammenfalten. Die beide Köpfe der Klemmen sollte sich gegenüberstehen, aber nicht berühren (das soll ja später beim Fahren gegen Objekte passieren). Beide Krokoklemmen werden nun vorsichtig durch die Karosserie geschoben und eine am „-“ Pin und die andere PIN „0“ geklemmt. Dann kommt der Deckel als Befestigung der Vorlage drauf – und los geht‘s!
Du möchtest mit der Programmiersprache NEPO® programmieren? Hier findest du den Programmcode
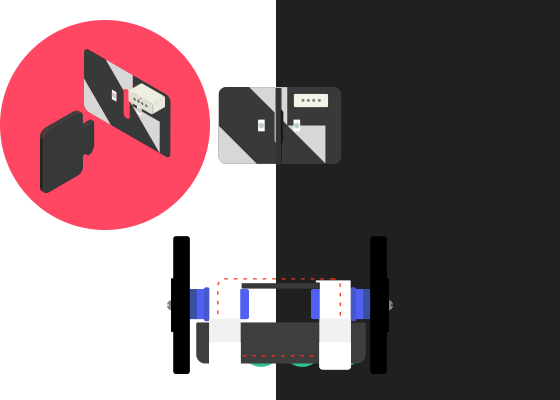
Folge dem Licht
Wo ist die hellste Stelle im Raum? Welche Objekte oder Lebewesen orientieren sich am Licht? Gestalte deinen Roboter selbst.
Welche Objekte oder Lebewesen orientieren sich am Licht? Gestalte deinen Roboter selbst.
Hierzu musst du die Lichtplatine zusammensetzen und mit dem beiliegenden Grove-Kabel am Calliope mini (Konnektor A0) verbinden. Wenn es dir unklar ist, findest du die Aufbauhilfe in der Anleitung.
Spiel die Hex Datei direkt auf deinen Calliope mini oder programmiere es selbst.
Du möchtest mit der Programmiersprache NEPO® programmieren? Hier findest du den Programmcode