Mit MakeCode Programmieren
Paket hinzufügen
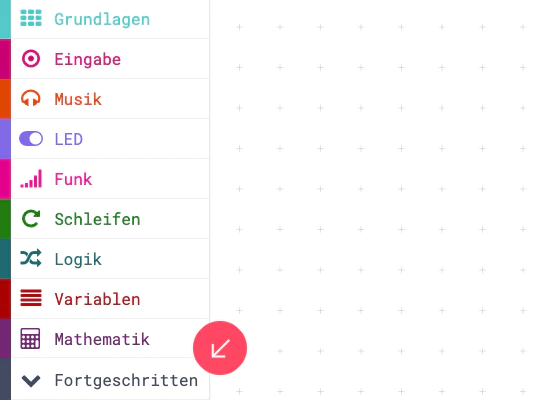
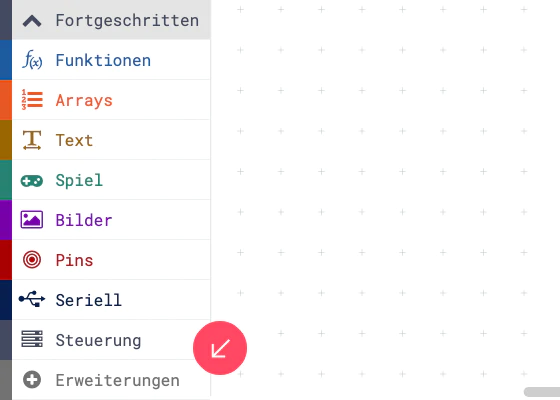
Unter https://makecode.calliope.cc findest du die neueste Version. Klicke dann in der Block-Bibliothek auf den Block Fortgeschritten um die MotionKit Erweiterung hinzuzufügen Scrolle ganz nach unten.
Die vorher eingelegten Muttern sorgen dafür, dass du nun den Calliope mini leicht befestigen kannst. Schraube deinen mini fest, aber nicht zu fest. Es reicht, wenn er nicht mehr wackelt. Denk daran, dass du ihn später immer noch fester schrauben kannst.
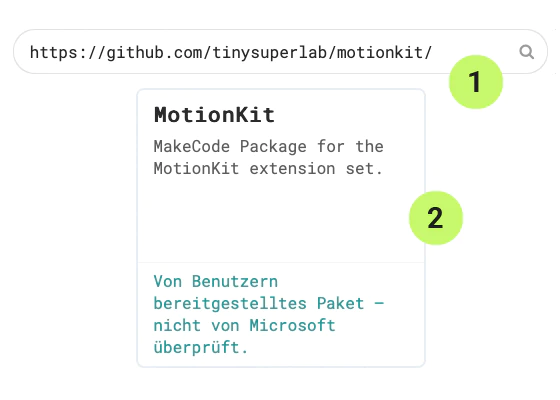
Gib die folgende Adresse im neuen Fenster Paket hinzufügen ein:
https://github.com/tinysuperlab/motionkitBei mobiler Nutzung ist dieses Paket zu laden (damit bleibt Bluetooth weiterhin verfügbar):
https://github.com/tinysuperlab/motionkit_bluetoothKlicke auf die MotionKit. Das Motionkit wird nun in der Block-Bibliothek installiert.
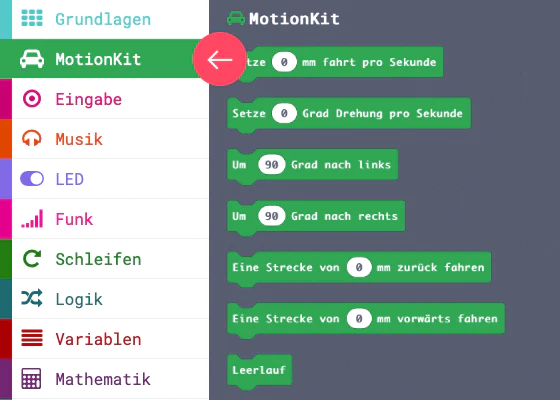
In deiner Block-Bibliothek befindet sich jetzt ein neuer, grüner Block mit der Aufschrift MotionKit. Wenn du auf den Block klickst, siehst du die Befehle, die du nutzen kannst.
- HINWEIS
Servo-Motoren drehen sich nicht immer ganz genau. Um bessere Ergebnisse zu erzielen, lohnt es sich die Motoren zu kalibrieren. Hier ist ein ganz einfaches Projekt, in dem die nötigen Blöcke genutzt werden:
.HEXCode öffnen Starte deine Runde
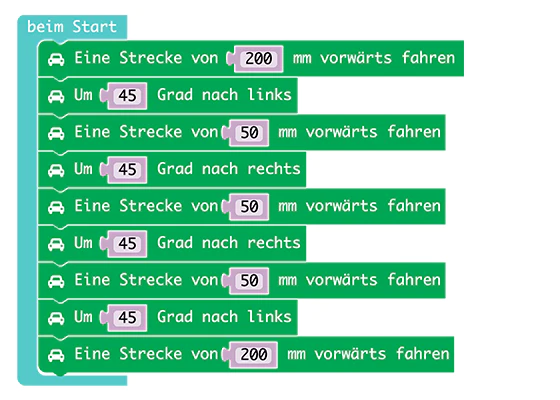
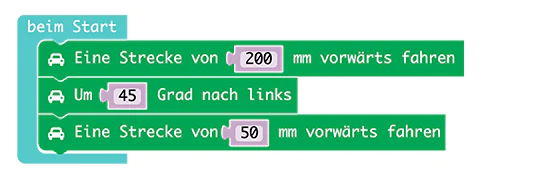
Beginne mit einer Strecke, indem du den Block “Eine Strecke von () mm vorwärts fahren” nimmst und z.B. den Wert 200 als Parameter einsetzt. Dann nutze den Block “Um () Grad nach links” und gib eine Gradzahl an, die sinnvoll ist. Danach nutzt du nochmal den ersten Block. Nun sollte dein Auto fahren, sich etwas drehen und anschließend weiterfahren.
Achte darauf, dass die Steuerung der Servo-Motoren etwas variieren kann und deshalb bei dir die Werte vielleicht angepasst werden müssen.
Parallel fahren
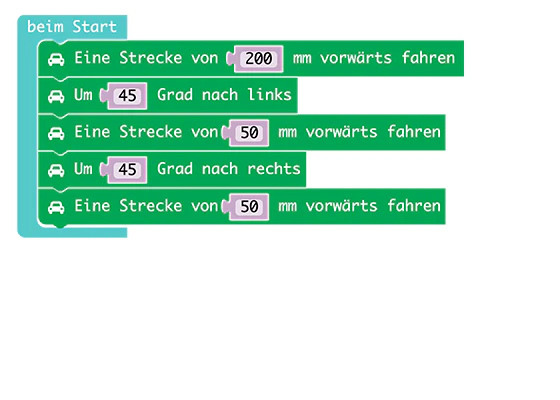
Nutze nun den Block “Um () Grad nach rechts” und gib eine Gradzahl an, die sinnvoll ist (wenn du die gleich von der vorherigen Kurve nimmst, dreht sich dein Fahrzeug zu der vorherigen Richtung). Danach nutzt du nochmal den ersten Block, um wieder ein Stück zu fahren.
Zurück in der Spur
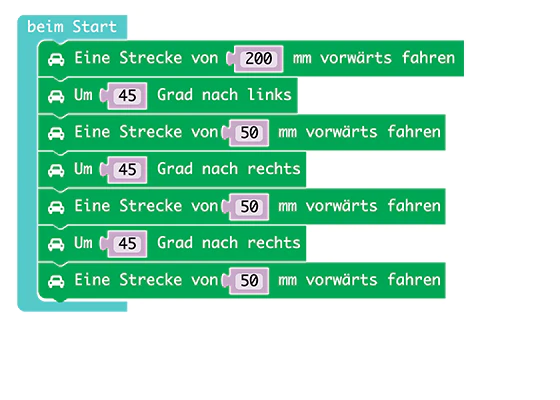
Wenn du nun wieder langsam auf deine Ausgangsstrecke zurückkommen möchtest, dann fügst du nun nochmal eine Drehung ein und dann nochmals ein Stück vorwärts. Wenn die Werte stimmen (oder du sie soweit angepasst hast, dass die Strecke identisch ist), dann bist du nun wieder auf der Geraden, auf der du gestartet bist.
Zielgerade
Wenn du nun das Auto nochmals drehst, dann musst du nur noch geradeaus fahren und kommst bei einem Ziel an, was in etwa auf der Strecke liegen sollte, auf der du gestartet bist.
Hat etwas nicht geklappt oder du hast das Prinzip verstanden? Ändere doch Mal die Werte und sieh dir an, wie das Auto dann fährt. Du kannst dein Programm natürlich auch mit Tönen oder Farben auf der RGB-LED kombinieren!
Falls du erstmal nur testen möchtest, kannst du diese .Hex Datei ausprobieren
.HEXCode öffnen