MakeCode

Programmieren mit MakeCode
Die Codeblöcke für das MotionKit lassen sich als Erweiterung laden. Als eine kleine Starthilfe in MakeCode, gibt es hier eine Schritt-für-Schritt Anleitung.
Über das ”+” lässt sich ein neues Projekt starten.

Wähle deine Hardware aus.
Erweiterungen öffnen

Erweiterung auswählen

MotionKit Paket

Das Motion Kit Paket erscheint in der Codeblock-Bibliothek und stellt die Codeblöcke bereit.
Motoren steuern
Steuere die beiden Motoren getrennt voneinander oder gemeinsam. Du bestimmst die Richtung und das Tempo.
Über folgende Codeblöcke lässt sich das MotionKit steuern:

Erstelle kleine und große programmierte Kunstwerke! Das MotionKit lässt sich in einen Mal-Roboter verwandeln. Befestige einen Stift und los geht’s.
Lichter steuern
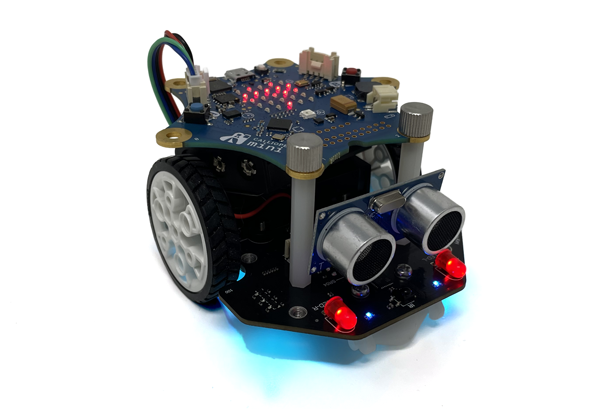
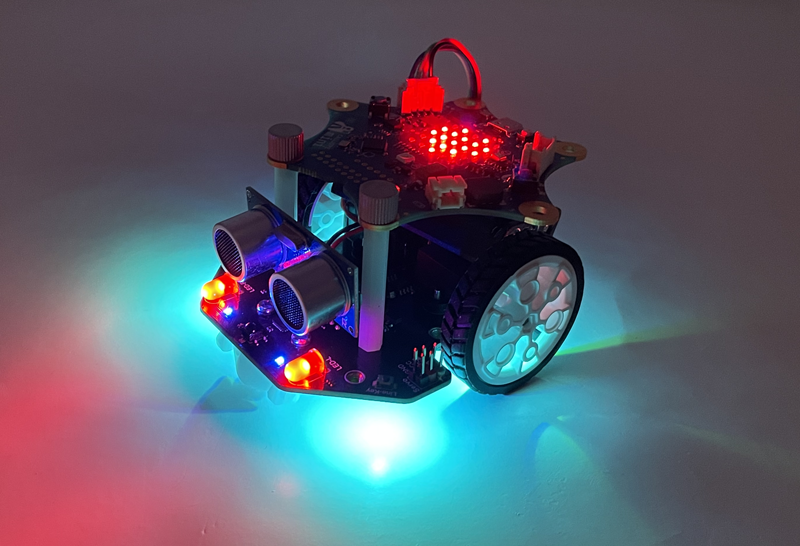
Das MotionKit 2 ist ausgestattet mit 2 roten LEDs - eine ist links und eine rechts montiert. Diese beiden LEDs lassen sich getrennt voneinander ansprechen. Vier RGB-LEDs auf der Unterseite sorgen für ein magisches Fahrerlebnis.

Fernsteuern
Steuere einen Calliope mini mit einem Weiteren. Die Nachrichten werden über Funk gesendet und empfangen.
Verwende folgende Codeblöcken für die Funkübertragung:

Die Logik dahinter:
Weise beiden Calliope mini dieselbe Funkgruppe zu.
Definiere 4 Ereignisse für die Steuerung: geradeaus, anhalten, links, rechts.
Weise jedem Ereignis eine Zahl zu z.B. 0, 1, 2, 3.
Trifft ein Ereignis ein, sende per Funk die zugewiesene Zahl.
In der Funktion Wenn Zahl empfangen werden die Zahlen mit Hilfe von Wenn… dann Abfragen ausgewertet und das vorab definierte Fahrverhalten ausgeführt.
Sowohl auf den Sender als auch auf den Empfänger Calliope mini kann dasselbe Programm gespielt werden.
Ultraschallsensor
Kollisionserkennung - Verwende den Ultraschallsensor, um Hindernisse zu erkennen und Zusammenstöße zu vermeiden.
Über folgenden Codeblock lassen sich die gemessenen Werte des Ultraschallsensors abfragen:



Linienfolger
Die zwei Lichtsensoren auf der Unterseite können zwischen hell und dunkel unterschieden. Mit Hilfe dieser gemessenen Werte wird des MotionKit an der Linie entlang gesteuert. Damit das funktioniert, setze das MotionKit 2 zu anfangs auf eine dunkle Fläche.


Die Logik dahinter:
Beide Lichtsensoren bekommen einen Wert. Entweder 0 oder 1. 1 = dunkle Fläche | 0 = helle Fläche
Sendet der linke und der rechte Sensor eine 1, befindet sich das Motion Kit über einer Linie und es fährt weiter gerade aus.
Sendet der linke Sensor eine 0 und der rechte Sensor eine 1, scheint das MotionKit von der Linie abzukommen. Jetzt muss nachjustiert und ein bisschen nach rechts gesteuert werden.
Sendet der rechte Sensor eine 0, ist eine leichte Kursänderung nach links nötig.
Senden beide Sensoren eine 0, ist das Motion Kit vom Weg abgekommen und fährt weiter gerade aus, bis wieder eine Linie gefunden wird.
Servomotor steuern
Über die extra Pins lassen sich bis zu zwei Servomotoren anschließen. Einfach anstecken und durchdrehen!
Über folgende Codeblöcke lassen sich die Servomotoren über die Winkeleinstellung ansteuern:

Infrarotsensor
Steuere das MotionKit 2 mit einem Infrarotsensor.
Folgende Infrarot-Codeblöcke stehen zur Verfügung:
